|
Minjae Kim I'm an M.S. student in Computer Science at Yonsei University Mirae Campus. I am currently advised by Prof. Han Ul Yoon in the HAN Lab. I believe generalist robots are the ultimate goal of robotics research. Since continuous real-world interaction is costly and risky, my research focuses on leveraging limited, static datasets to learn broad capabilities. I am particularly interested in Offline Reinforcement Learning (Offline RL) as a key approach to achieve this vision. |
|
Research InterestsI'm interested in Offline RL, model-based RL and generalist robot. |
Publications and preprintsPapers sorted by recency. Representative papers are highlighted. 
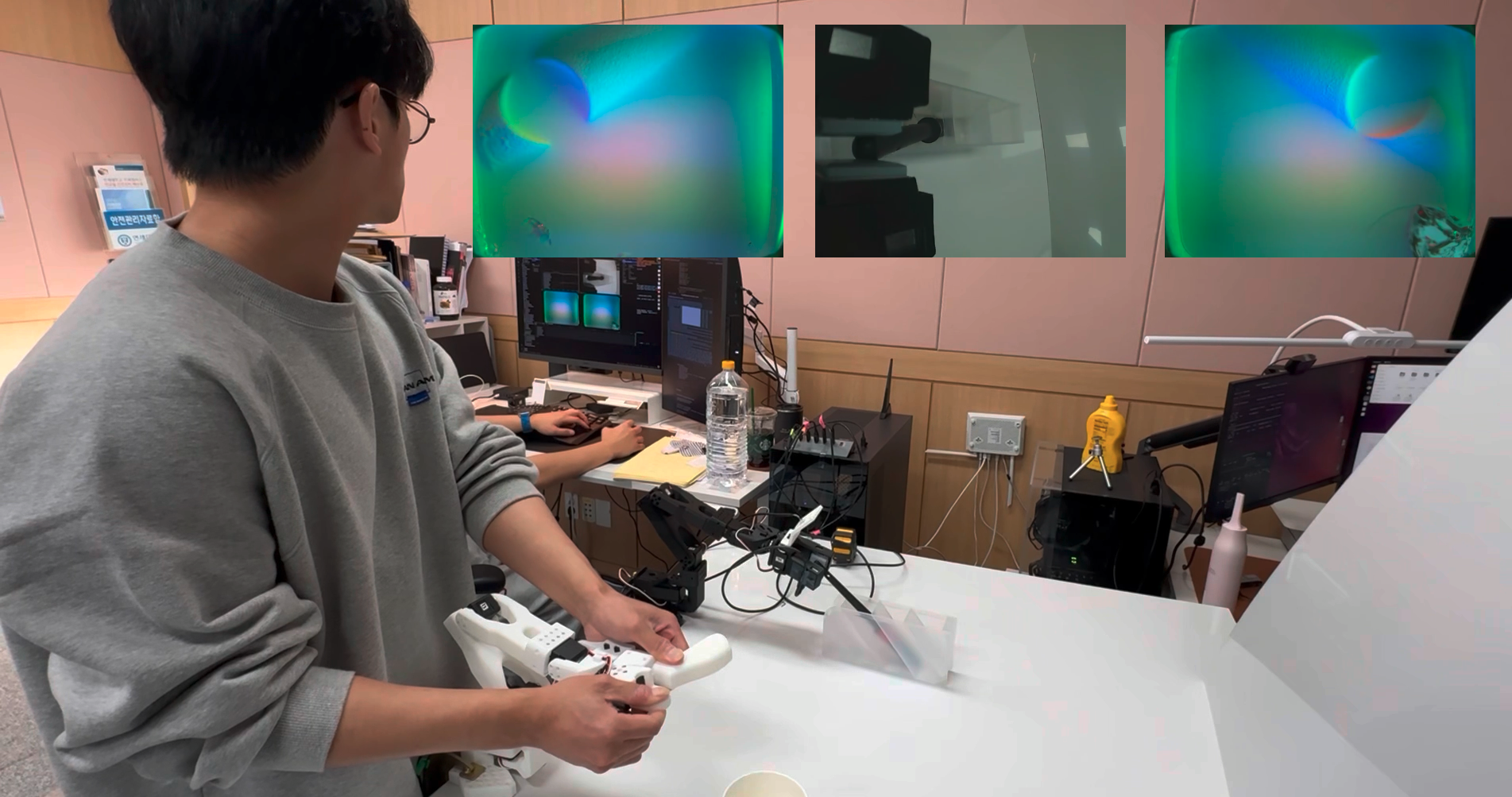
Solving the One-Hole One-Ball Patience Cube Task using Model-based Reinforcement Learning
International Symposium on Advanced Intelligent Systems (ISIS), 2025 (Best Paper Award)
Projects |